希尔排序¶
前置知识¶
插入排序,分组思想
目标¶
算法思路,代码模板
希尔排序¶
希尔排序(Shellsort),也称递减增量排序算法,是插入排序的一种更高效的改进版本。希尔排序是非稳定排序算法。
希尔排序是基于插入排序的以下两点性质而提出改进方法的:
- 插入排序在对几乎已经排好序的数据操作时,效率高,即可以达到线性排序的效率
- 但插入排序一般来说是低效的,因为插入排序每次只能将数据移动一位
算法思想:
- 把序列按下标的一定增量分组(增量初始值可为
len / 2),对每组使用直接插入排序算法排序- 随着增量逐渐减少,每组包含的关键词越来越多
- 当增量减至1时,整个序列恰被分成一组,算法便终止
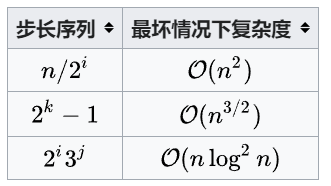
平均时间复杂度,根据步长序列的不同而不同。
最坏时间复杂度,根据步长序列的不同而不同。已知最好的是 \(O(nlog^2n)\)
最优时间复杂度,\(O(1)\)
空间复杂度,\(O(1)\)
例如,假设有这样一组数[ 13 14 94 33 82 25 59 94 65 23 45 27 73 25 39 10 ]。
如果我们以步长为 5 开始进行排序,我们可以通过将这列表放在有 5 列的表中来更好地描述算法,这样他们就应该看起来是这样:
然后我们对每列进行排序:
将上述四行数字,依序接在一起时我们得到:[ 10 14 73 25 23 13 27 94 33 39 25 59 94 65 82 45 ]。
这时 10 已经移至正确位置了,然后再以 3 为步长进行排序:
排序之后变为:
最后以1步长进行排序(此时就是简单的插入排序了)。
步长¶
步长的选择是希尔排序的重要部分。只要最终步长为 1 任何步长序列都可以工作。算法最开始以一定的步长进行排序。然后会继续以一定步长进行排序,最终算法以步长为 1 进行排序。当步长为 1 时,算法变为普通插入排序,这就保证了数据一定会被排序。
“比较在希尔排序中是最主要的操作,而不是交换。”
用合适的步长,希尔排序比插入排序要快,甚至在小数组中比快速排序和堆排序还快,但是在涉及大量数据时希尔排序还是比快速排序慢。
代码模板¶
#include <bits/stdc++.h>
using namespace std;
int a[110], n;
void shell_sort(int a[], int len) {
int step = 1;
while (step < len / 3) step = 3 * step + 1;
while (step >= 1) {
for (int i = step; i < len; i++)
for (int j = i; j >= step && a[j] < a[j - step]; j -= step)
swap(a[j], a[j - step]);
step /= 3;
}
}
int main(){
cin >> n;
for (int i = 0; i < n; i++) cin >> a[i];
shell_sort(a, n);
for (int i = 0; i < n; i++) cout << a[i] << ' ';
puts("");
return 0;
}
参考¶
https://en.wikipedia.org/wiki/Shellsort
https://zh.wikipedia.org/wiki/%E5%B8%8C%E5%B0%94%E6%8E%92%E5%BA%8F